"GHOST" ein RC Stealth Boot

Zur Geschichte:
Am 12. Oktober 2000 wurde im Persischen Golf das Kriegsschiff U.S.S. Cole durch ein kleines und leichtes Schnellboot, beladen mit 500kg Sprengstoff massiv beschädigt. Dieser Angriff auf die U.S.S. Cole erfolgte während eines kurzen Tankstopps im Hafen von Aden, Jemen.
Die Bombenexplosion, die durch ein einfaches Holzboot mit Außenborder, verursacht wurde, riss ein großes Loch in die Seite des Kriegsschiffes und
tötete mehrere Matrosen im Inneren.
In Anbetracht der simplen Aufwandes und der Ausführung des Angriffes und, wollte der Eigentümer Gregory Sancoff des amerikanischen
Unternehmens JULIET MARINE SYSTEMS ein kleines und schnell eingreifendes Angriffsboot auf Basis zweier torpedo-ähnlichen Rümpfen entwickeln,
um solche Angriffe schon im Vorfeld abzufangen.


Die Form und Ausführung sollte dafür sorgen, auch bei höheren Wellengang die Mannschaft wohlbehalten zu ihren Angriffs- und Einsatzziel zu
bringen.
Das Prinzip von Doppelrümpfen ist nicht neu und schon in den 80zigern wurden Schnellboote und Fähren damit ausgestattet, um den Passagieren einen hohen Reise-Komfort zu ermöglichen.
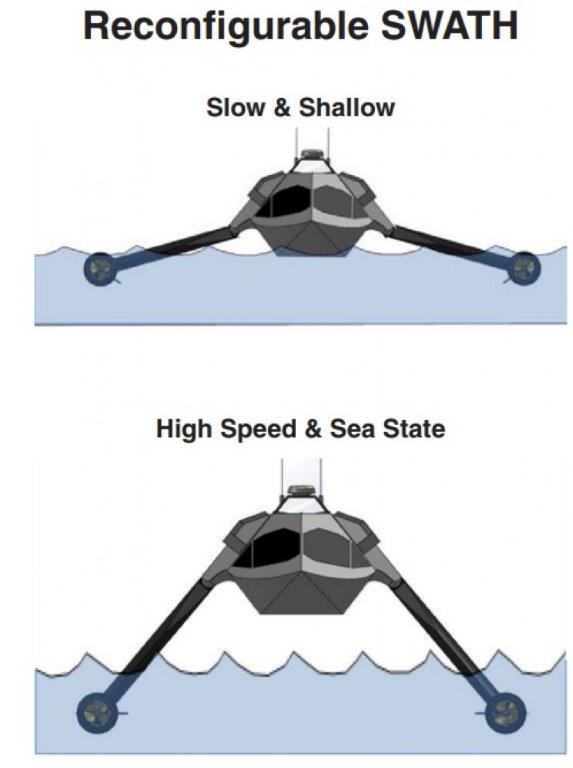
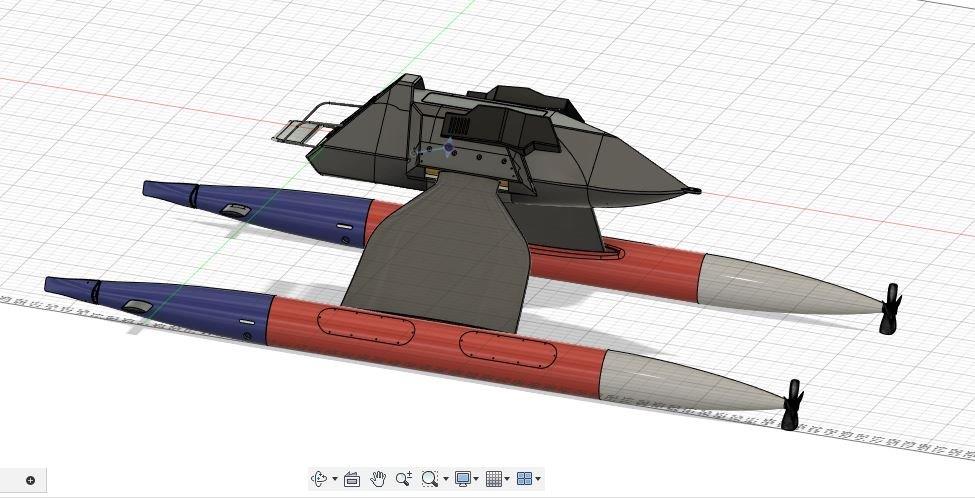
In speziell diesen Fall jedoch handelt es sich nicht nur um einen zentralen Bootskörper mit zwei Rümpfen, vielmehr ähnelt es mehr einem Jäger aus Krieg der Sterne, dessen Flügeln, in diesem Fall die Ausleger, auf welchen die Rümpfe montiert sind, sich heben und senken lassen.
Der Antrieb war auch hier sehr speziell. Um die durch Kavitation hervorgerufenen Luftblasen zu reduzieren, wurden die Schiffschrauben ( 2x hintereinander liegende 4 Blatt Propeller) an die Spitze der Schwimmkörper positioniert.
Der Grund:
Im nicht angehobenen Zustand befindet sich das eigentliche Boot noch auf seinen eigenen Schwimmkörper.
Erst durch Anheben ( "Steilstellung") der Ausleger sinken die torpedo-ähnlichen Schwimmkörper ab und heben das Boot um za. 3m an.
Dadurch wird eine höhere Geschwindigkeit erreicht, da sich nun der induzierte Widerstand verringert. Zusätzlich bekommt der Steuermann eine erhöhte Aussicht und die Fahr wird ruhiger.
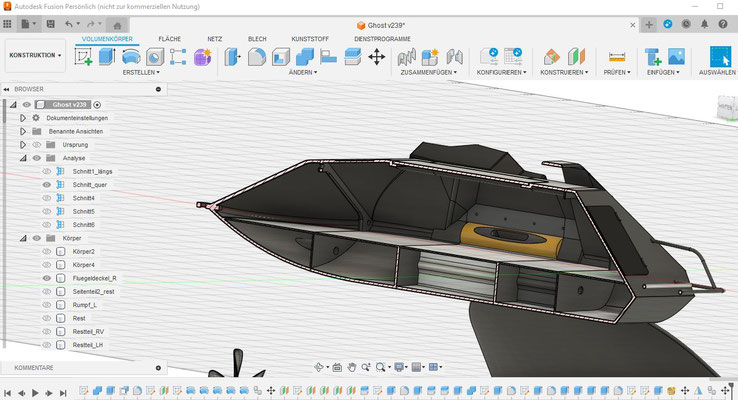
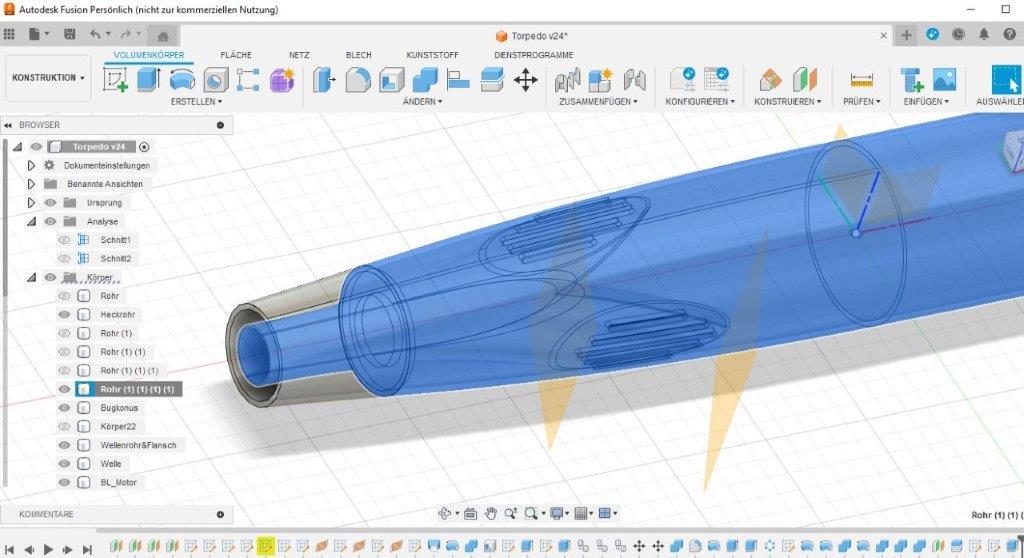
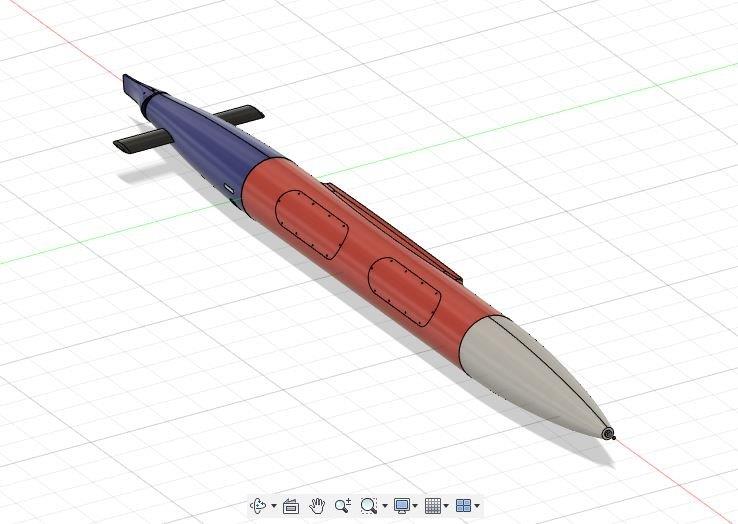
Die 3D Konstruktion:
All dies lässt sich wunderbar im Internet nachvollziehen und würde ein tolles RC-Boots Projekt abgeben.
Da ich bisher noch auf keine direkten Ansichten des Bootes gestoßen bin und bis auf wenige technischen Angaben nichts zu finden gab, beschränkte sich die 3D-Konstruktion auf wenige Ansichten, Vermutungen, Annahmen und: Fantasie.
Zugegeben, es sollte keine Scale-Modell werden. Einfach mal was anderes als die herkömmlichen Modelle, die auf den Seen unterwegs sind aber in Anbetracht des Designs und der Konstruktion eine handliche Größe aufweisen.
Zu- und Anbauten:
Sämtliche zusätzliche Anbauten wie Kühler, Ausleger und Schwimmkörper wurden ebenfalls erstellt, jedoch als separate Teile umd sie gesondert am 3D Drucker erstellen zu können.
Die hintere Türe ist im Original zweiteilig gestaltet, hier im Modell jedoch nur als Zusatzteil zum Aufkleben.
Die hintere Reling wurde ebenfalls als 3D-Teil erstellt, und sollte erst ganz zum Schluss in Angriff genommen werden. Auch eine Ausführung aus PVC wäre möglich.


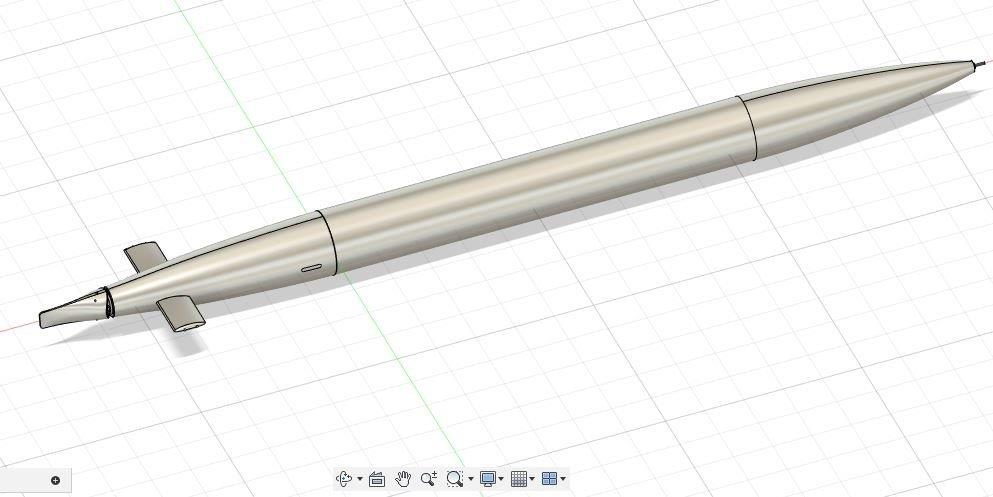
Nach dem dann so die Grundabmessungen des zentralen Bootskörpers feststanden ( ca. 12m Boots-Körper, was im Modell eine Größe von 60cm haben sollte und somit einen aktuellen Maßstab von 1:20 entspricht…) ergaben sich auch die Abmessungen der Schwimmkörper mit ca. 100cm, was schon eine beachtliche Länge darstellt. Daraus folgte. Zum Transport müssen diese Teile zerlegbar sein!
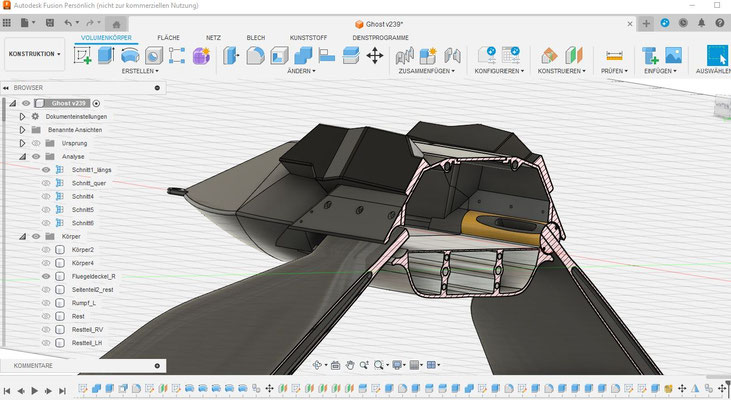
Den Hauptrumpf wollte ich später auf Grund der Größe Teilbar und somit für den 3D Drucker auch druckbar machen. Im Zusammengebauten Zustand sollte er durch FK-Rohre verbunden sein und ein Mitteldeck für die RC-Installation aufweisen.
Der Raum darunter sollte als Auftriebskörper dienen ( damit mir das Teil im Notfall nicht absäuft..).
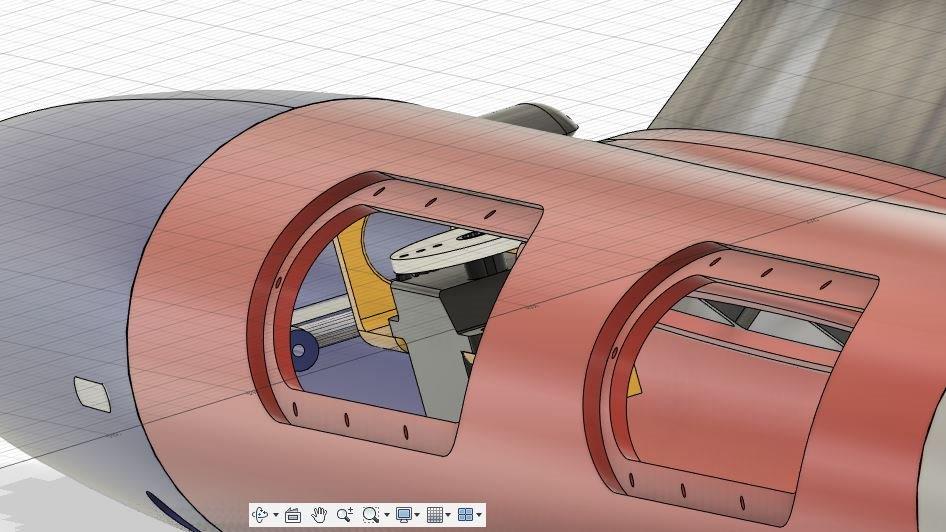
Ausleger:
Die Ausleger wollte ich mittels zylindrischen Dreh-Elementen, die in eine Art Lager laufen, als gesamte Einheit drehbar sein. Die wollte
ich durch einen starken, etwa 25kg Servo für jede Seite realisieren. Das sollte komplizierte und aufwendige Technik ersparen. so sieht es vorerst der Plan aus.....
Diese Drehelemente nehmen auch die Ausleger auf und sollten mit 2 Gummi-Lippen ausgestattet sein, um Wassereintritt zu verhindern....( ganz wird man es möglicherweise nicht vermeiden können...)
Zusätzlich sollte die Konstruktion es auch ermöglichen, diesen Drehteil mit dem Ausleger nachträglich einzubauen und auch wieder zu zerlegen, um eine Wartung durchzuführen und Reparatur zu ermöglichen.
Ein Deckel sollte dann alles wieder verschließen und sichern.
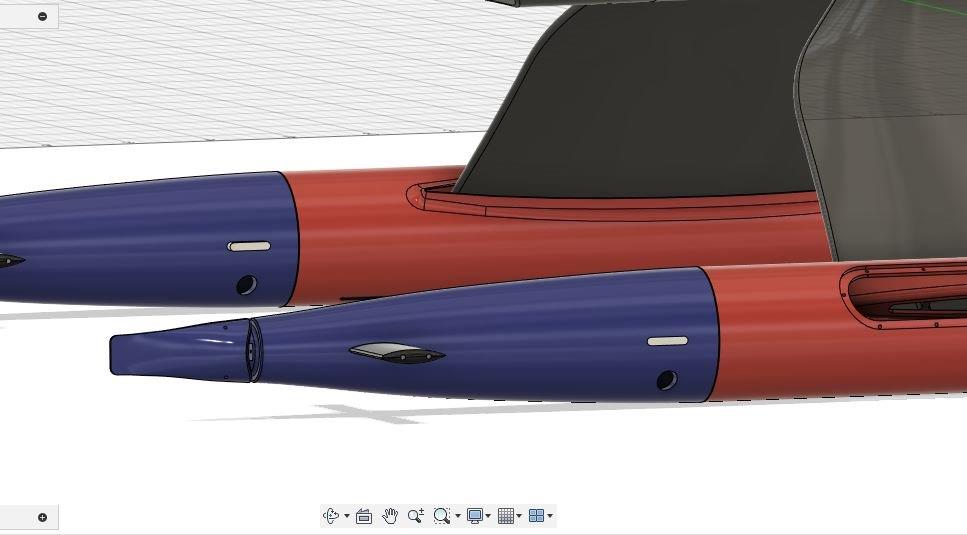
Schwimmkörper:
Nicht nur ein Mal musste ich die Form und Konstruktion überarbeiten, abgesehen von der Teilbarkeit zum 3D-Druck.
Diese Schwimmkörper nehmen beim Original die beiden je 2000 PS Gasturbinen auf, die das Schiff antreibt.
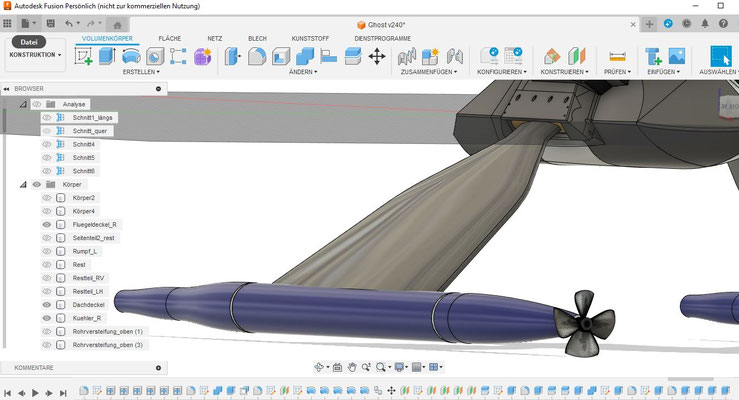
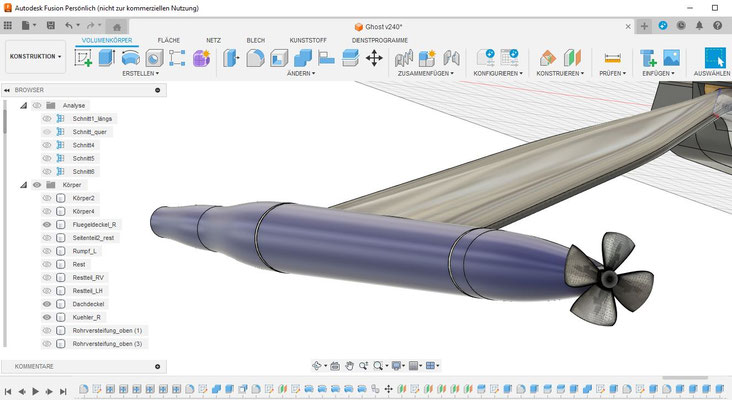
Der Vortrieb selber wird durch zwei an der Spitze der Schwimmkörper und hintereinander liegende Propeller erzeugt.
Diese Art des Antriebs sollte eine Art Luftblase um die Körper erzeugen und das ganze Boot ohne großen Widerstand dafür aber mit hoher Geschwindigkeit durch die Wellen bewegen....so das Original.
Im Modell wollte ich diese Variante übernehmen und daher auch das viele Tüfteln, um später auch zu den einzelnen Komponenten zu kommen...
Zusätzlich sollte es auch dicht sein!

Antriebskonzept:
Mehr Sorgen bereitetet mir jedoch zwei Themen:
1.) Der Antrieb
2.) Die Lageregelung
1.) Der Antrieb

1a.) Antrieb mit Propeller;
Im Original sorgen zwei je 1000PS Gasturbinen für den Vortrieb durch 2 hintereinander liegende 4-Blatt-Props.
Wollte ich dieses Konzept auch im Modell übernehmen, so würde das bedeuten, dass der Motor mit einer nach vorne laufenden Welle zumindest einen Propeller antreibt…und das ganze System dicht bleiben sollte!
Das ist prinzipiell kein Problem, denn aus dem U-Boot und Schiffsbereich gibt es gut Wellensysteme, die eine derartige Dichtheit aufweisen. Hier sollte im Bereich RC U-Boot und Schiffsmodell sicher das Passende zu finden sein.
Als Propeller kämen jene aus dem RC-U-Boot Sektor in Frage, mehrblättrig aus Messing für Drehzahlbereiche um die 3500 - 4000 U/min.

Der Motor würde ebenfalls dem U-Booten entspringen, mit einer kV Zahl zwischen 300 und 400 und einer Versorgung mit 3S-Lippo sollte dies genügend Kraft und ausreichend Fahrzeit ermöglichen.
Wie das mit der Kühlung jedoch aussieht, steht jedoch noch offen.
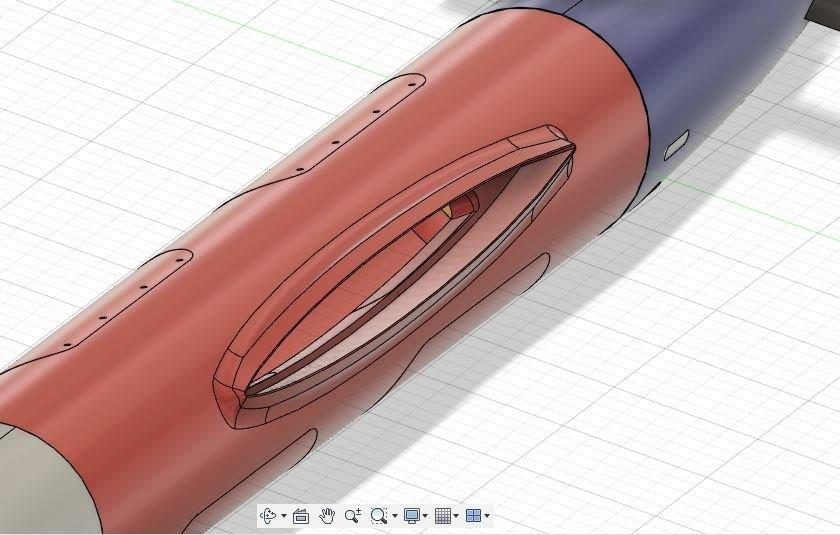
1b.) Antrieb mit Wasser-Jet;
Eine andere aber aus meiner Sicht durchaus machbare Variante wäre ein Jet-Antrieb.
Hier würde der Antrieb so in das Heck integriert werden, dass die Düse so am Heck mit der hinteren Kontur eine Einheit bildet und kaum auffällt…und zudem schwenkbar ist.
Das Ansaugen würde am Rumpf erfolgen oder durch Schlitze im Rumpf auf beiden Seiten.

2.) Lageregelung
Beim Original sind die beiden Schwimmkörper vollständig unter Wasser, also in Balance zwischen Sinken und Steigen.
Dieser Zustand wird durch eine eigene Regelung der vorderen und hinteren Stabilisatoren erreicht.
Das Modell müsste daher ebenfalls eine solche Regelung aufweisen, sollte es sich um getauchte Schwimmkörper handeln.
Hier wäre dann der Einstieg in die U-Boot Szene unausweichlich und bedarf dann einer exakten Steuer- und Regelung. Technisch und praktisch durchaus machbar aber sehr aufwendig und kostenintensiv, da alles doppelt erfolgen müsste.
Das erschien mir dann doch zu aufwendig für ein derartiges Projekt! Daraus resultiert:
Wenn schon mit 2 Schwimmkörper unterwegs dann sollte es so gerade an der Oberfläche schwimmen.
Die genaue Justierung würde ich dann mit kleinen Wasser-Ballast-Tanks erreichen oder Blei-Gewichte.
Es erfoglte nun eine beruflich bedigte Modell-Pause...
Nach nun einer längeren Modell-Pause auf Grund beruflichen Ausland-Einsatz, wurde das Thema wieder aufgenommen und mit Rücksprache einiger Modellbauer aus dem U-Boot Sektor konnte das Thema der Lageregelung definitiv ausgeschlossen werden.
Nicht auf Grund Unmachbarkeit sondern dem zu großen technischen Aufwand, der dann hier betrieben werden müsste.
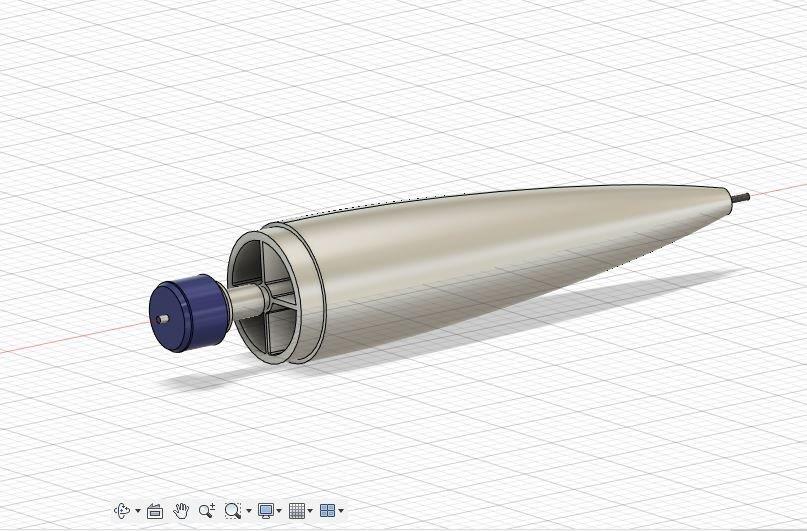
Die Wahl fiel auf den Antrieb vorne samt einem Ruder hinter, das, entgegen dem Original, so verdeckt als möglich ausgeführt werden sollte.
Ein BL-Motor der 400kV Type soll über eine Welle einen Propeller an der Spitze des Schwimm-Körpers antreiben…unter Umständen
sogar 2 hintereinander….wie beim Original!

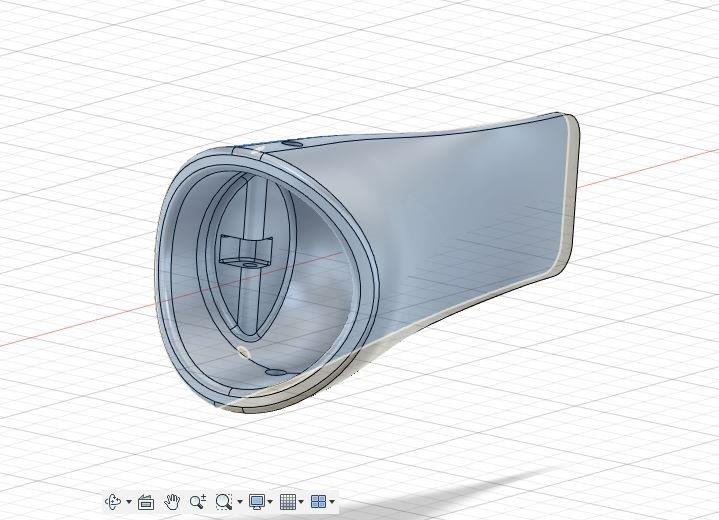
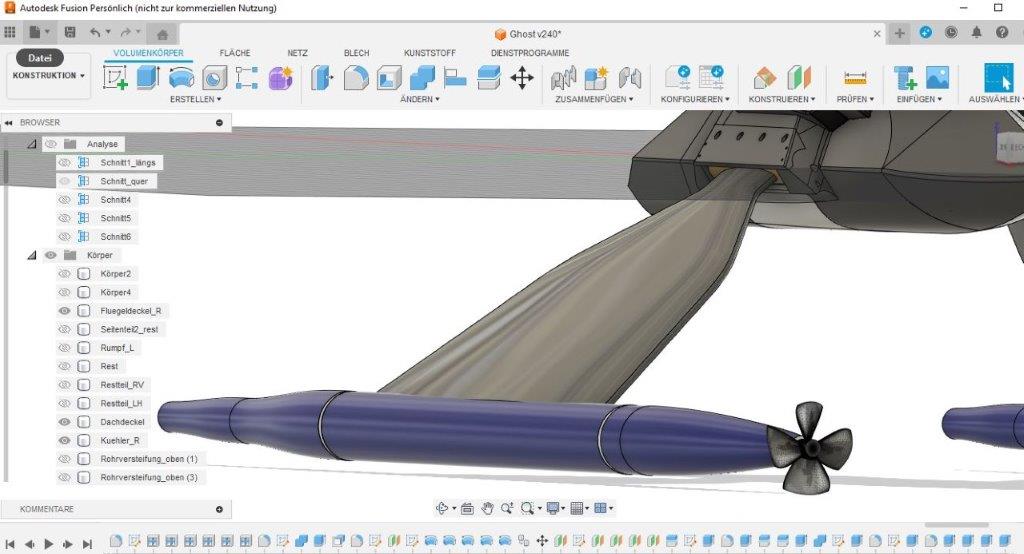
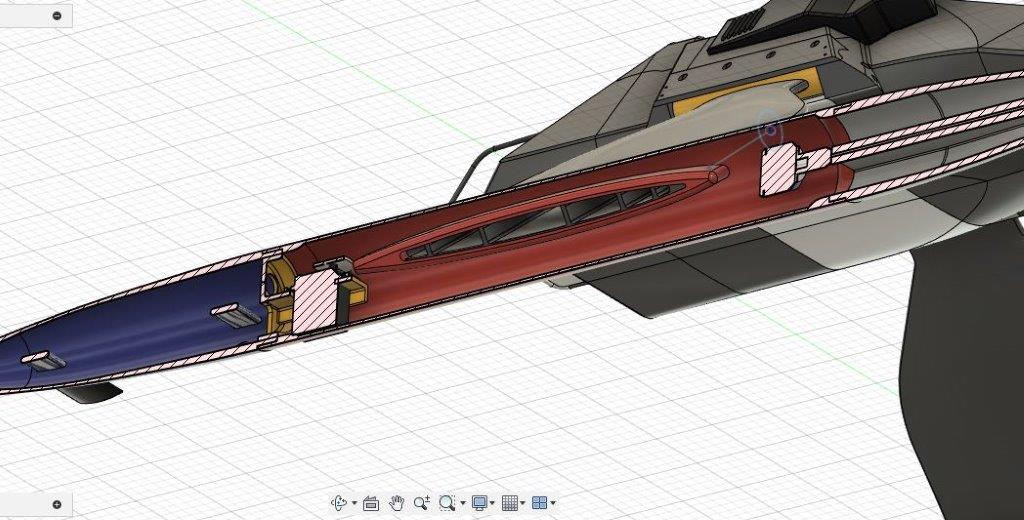
Der gesamte Schwimmkörper sollte zumindest 3-teilig sein und die Möglichkeit mittels Bleigewicht oder Wassertank trimmbar zu sein, so dass das fertige Fahrzeug mit seinen Schwimmkörper gerade die Wasseroberfläche erreicht.
3-Teilig aus aus dem Grund, dass bei zu geringen Volumen der Schwimmkörper ich das neue Volumen nur durch Abänderung des mittleren Elementes erreichen konnte.
Also wurde am Fusion etwas getüftelt und schließlich konnte doch eine Lösung für das Ruder und das Heckteil gefunden werden.

Die Anlenkung des Ruders sollte so unsichtbar als möglich erfolgen, weshalb ich sie bereits mit der dazugehörigen Montage für den Bowdenzug bzw. Gestänge in das Ruder integriert habe.
Das Ruder-Servo würde im Heckteil sitzen und das Gestänge dafür in Schmierfett gelagert werden. Nach Austritt des Gestänges oder des Bowdenzuges würde dieser Abschluss noch mit einem kleinen Gummi-Balg abgedichtet werden.
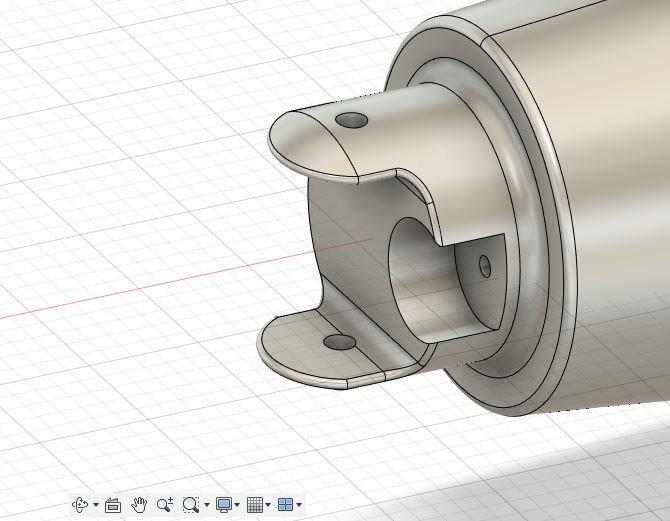
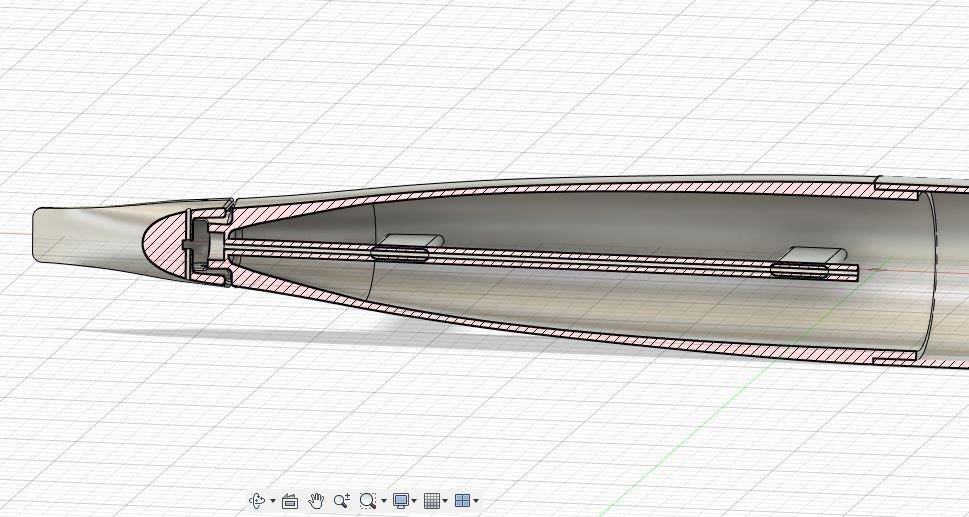
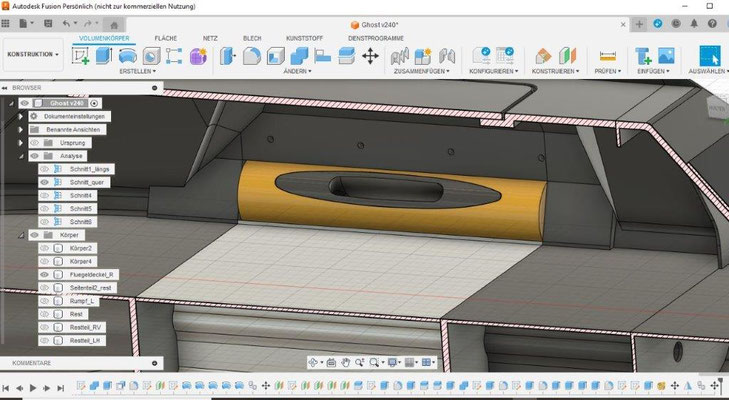
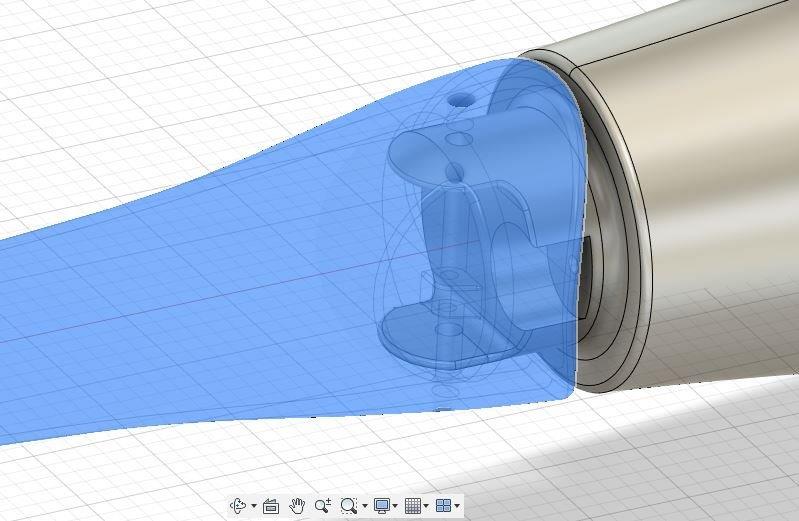
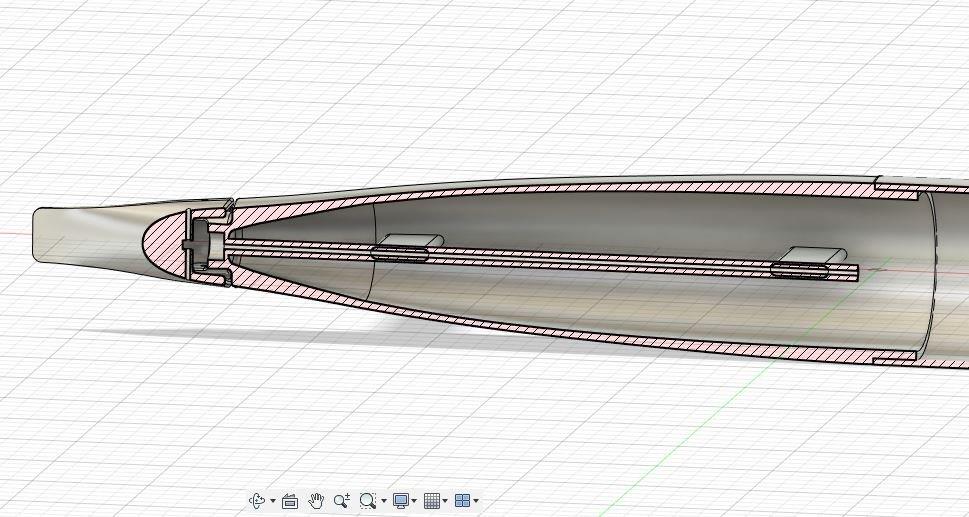
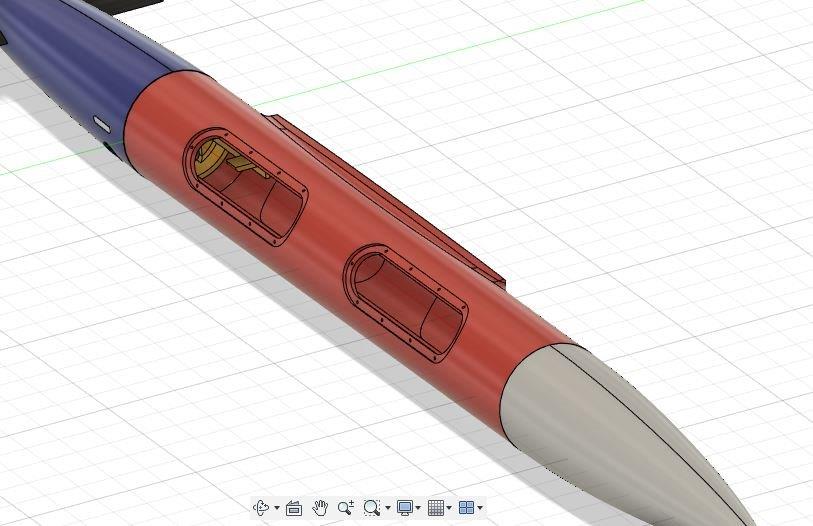
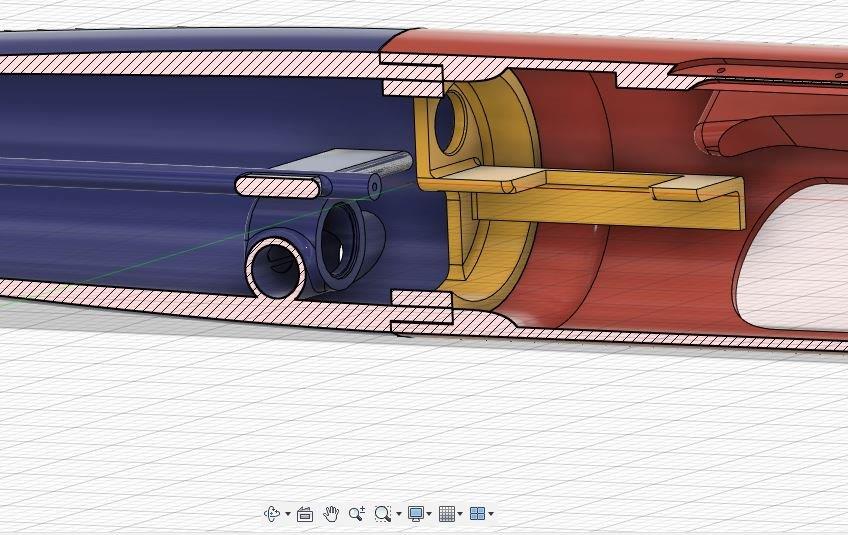
Das Vorderteil sollte den Motor samt Motoradapter und der Welle aufnehmen und ist für eine Wellenanlage ( also Welle samt Stevenrohr) ausgelegt.
Sie soll von hinten eingeschoben werden und auch gleich den Motorhalter aufnehmen, damit der BL-Motor hier gleich am Adapter montiert werden kann.
Vorne wird dann der Propeller oder gegebenenfalls die beiden Propeller montiert.
Die gesamte Wellenanlage wird dann abgedichtet und mittels in paar kleinen Madenschrauben im Rumpf-Vorderteil fixiert....Sie soll
ja auch demontierbar sein....
Um die Welle so gut als möglich in Vorderteil zu fixieren, wird sie durch 4 Längsstreben gehalten.







Als zusätzliche Hilfe bei Richtungsänderungen bei noch langsamer Geschwindigkeit hatte ich in Erwähnung gezogen, im Heckelement ein "Heckstrahlruder" einzubauen.
Dies sollte mir helfen, das ganze Gefährt auch im Stand zu drehen und als Unterstützung beim Ein- und Ausfahren der Ausleger.
Man kann also gespannt sein....