Twin Otter........Flug Modellbau
Kurz zur Vorgeschichte...
Die DHC-6 flog zum ersten Mal am 20. Mai 1965. Ende 1988 endete die Produktion des damaligen Typ’s der DHC-6 mit über 850 Maschinen.
Im Jahr 2006 erwarb das Unternehmen VIKING AIR die Produktionsrechte von BOMBARDIER AEROSPACE und im Dezember 2007 wurde nochmals mit der Produktion begonnen. Die unterschiedlichen Typen bekamen alle eine neue Endung wie zBsp. Dhc6-400.
Von der Twin Otter gibt es neben der
Standardausführung mit Rädern Versionen mit Schwimmern oder auch Kufen. Die Mehrzahl der Maschinen wird von kleineren Gesellschaften verwendet und verkehren als Insel Taxis in
Urlaubs-Destinationen wie den Malediven und den Seychellen aber auch in Nepal wird sie auf atemberaubenden Flugplätzen eingesetzt, um Bergsteiger und auch kleine Dörfer mit dem Notwendisgten zu
versorgen.
Seit Mitte Mai 2018 besitze ich die Twin Otter von VQ
Modell.
Aufgebaut wurde sie nach langer Vorbereitung und Hinweisen in diverser Foren .
Sie wurde beim Händler meines Vertrauens bestellt und irgendwann war es dann soweit…..

...das Original...

Aufbau + Vorbereitung:
Der Bausatz ist komplett, einzig und alleine die beiliegenden Ruderhörner strahlen nicht gerade Vertrauen aus.
Sie wurden aus bereits bestehende Teilen aus meinem Fundus ersetzt.
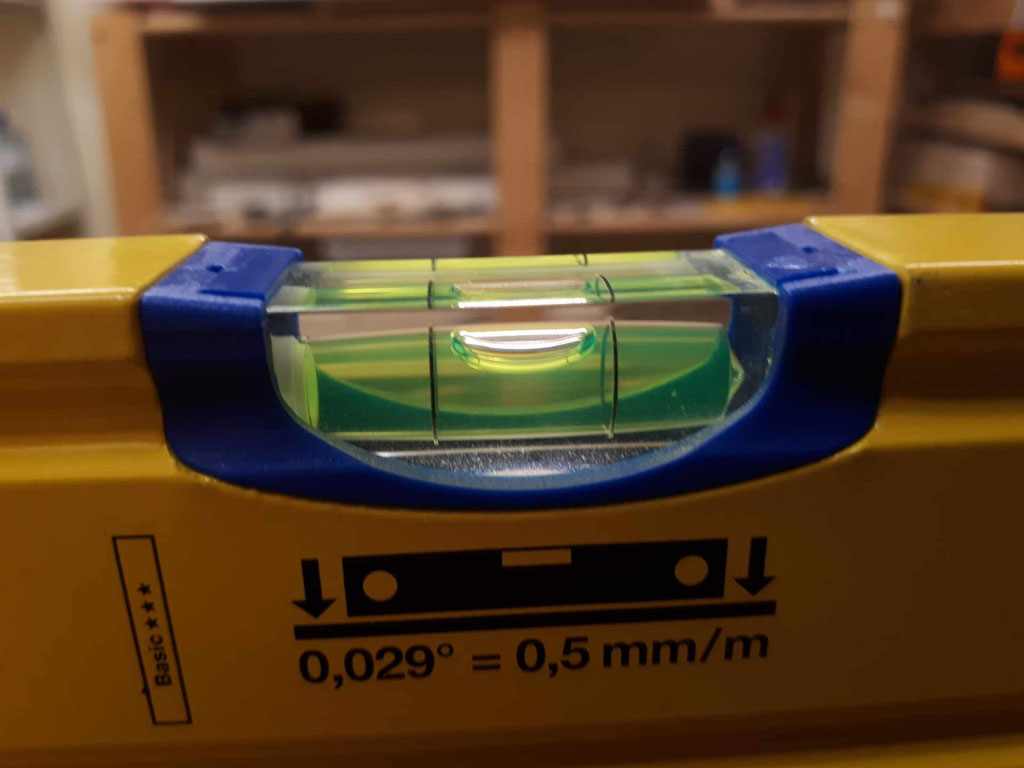
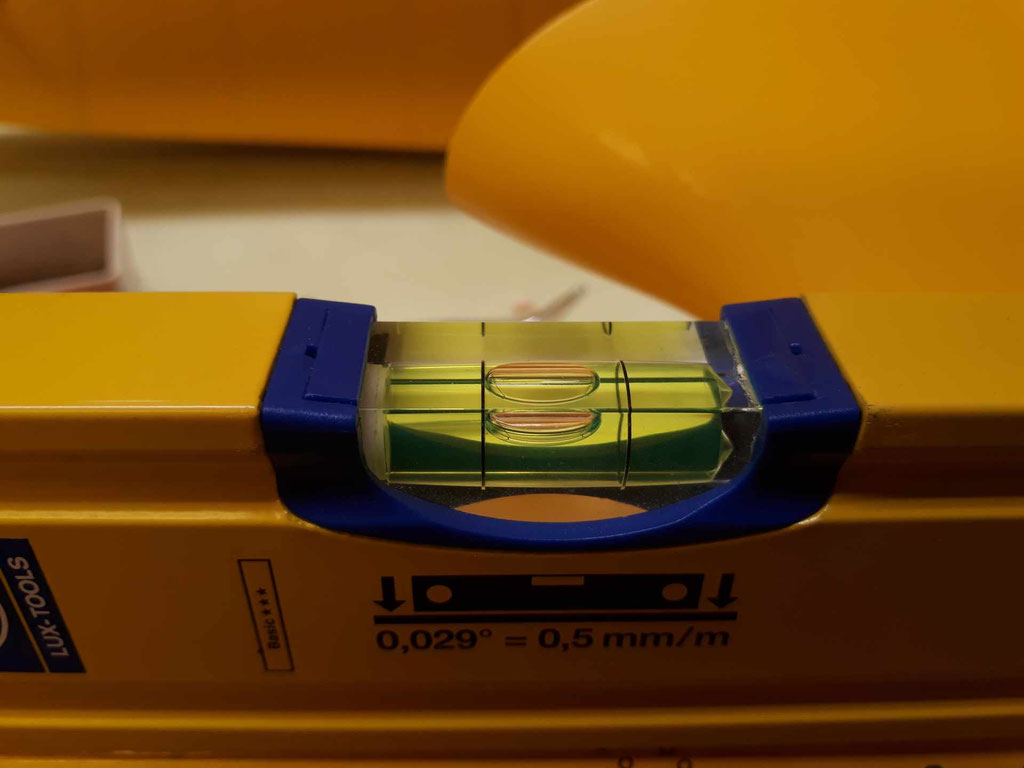
Des Weiteren sind 2 EWD Lehren aus Karton dabei…
Damit wird im Zuge der Bauanleitung das Leitwerk hinten so ausgerichtet, dass die Bohrungen der EWD Lehre im Flügelspant mit
denen der Lehre übereinstimmen. Gleichzeitig wird das HLW ausgerichtet und fixiert... das sollte dann passen…
Was jedoch nicht gepasst hat:
Bei einen der Lehren stimmten die Bohrungen nicht, die Andere passte perfekt.

Weiß' der Kuckuck, wozu hier 2 Stück Lehren ( unterschiedliche..) verpackt waren und ich erwische zum Abstimmen genau die Falsche....
Die Schwimmer wurden dann jedoch mit der ( richtigen ) Lehre eingestellt....


Die Einstellung erfolgte so, dass der Schwimmer eine geringfügig größere Anstellung hat als gegenüber der Achse Wurzelrippe zu HLW.
Des Weiteren wurden die Schwimmer noch vor Fixierung und Erstellung der vorderen Schwimmerstreben an den Rumpf so ausgerichtet, dass sich die Rumpfzelle genau mittig und symetrisch zwischen den beiden Schwimmern befindet.
Dazu wurde einfach die falsche Lehre missbraucht und darauf Mrkierungen vorgenommen.........

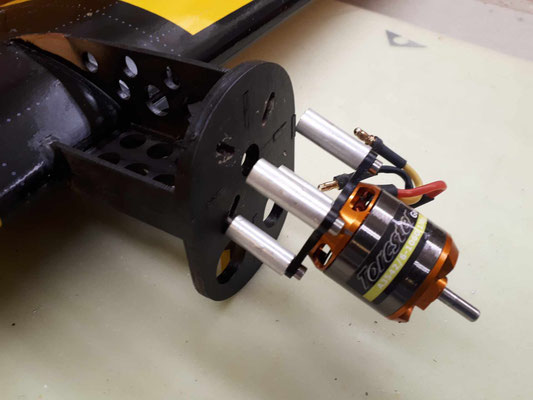
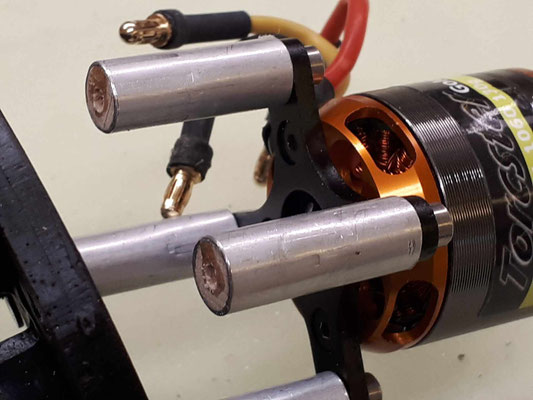
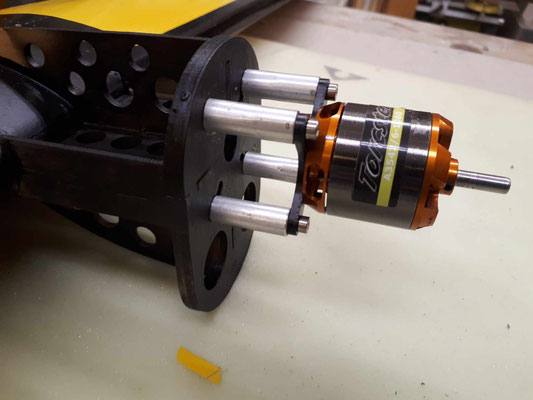
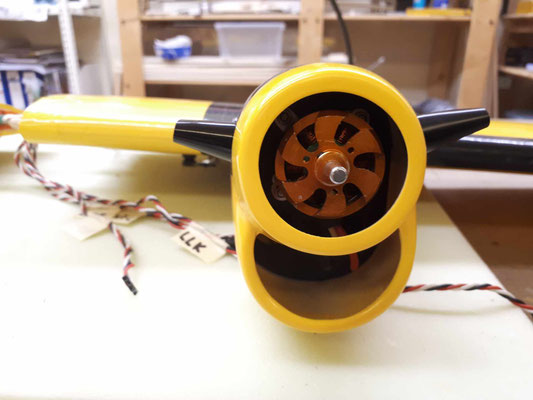
Ebenfalls die M3x35mm Schrauben für die Motorbefestingung an den beiden Gondeln.
Sie hatten alle Kreuzschlitze, waren viel zu weich....einfach Schrott!!
Sie wurden durch Distanz-Elemente aus einem 10/8er Alurohr und 8mm Buchenrundmaterial auf der Drehbank erstellt…samt M3 Gewinde auf
jeder Seite….für die passenden Edelstahlschrau-ben….


Für den Akku habe ich mir eine Box aus 4mm Sperrholz lasern lassen, da auch größere Lippos zum Einsatz kommen sollten und damit sowohl
der Schwerpunkt besser einstellbar ist also auch das Tauschen des Akku's leichter fällt!.
Sie kam so weit als möglich in die Nase.



Sämtliche sichtbaren und erreichbaren Holzteile wurden mit Porenfüller behandelt um eine gewisse Wasserresistenz zu
erhalten.
Der Holzteile für die Motorgondeln wurde ebenfalls so behandelt und schwarz gestrichen.
Ein kleiner Trick, mit dem man einfach aber effektiv lackieren kann:
Verwendung eines vorhandenen Müllbeutels…
Wird einfach so weit als möglich über das Objekt gestülpt, danach die zu lackierenden Teile beim Beutel aufreißen und rundherum abkleben…



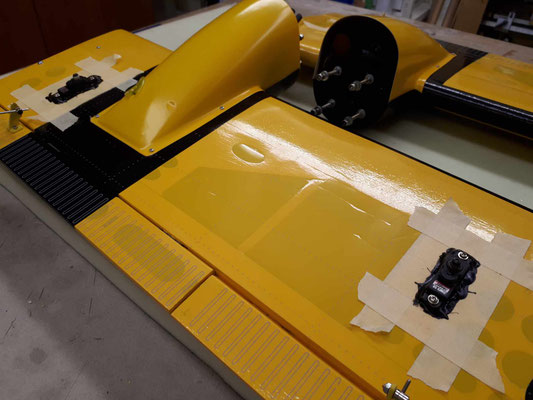
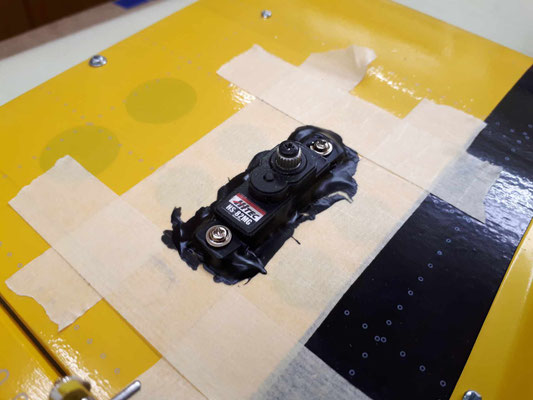
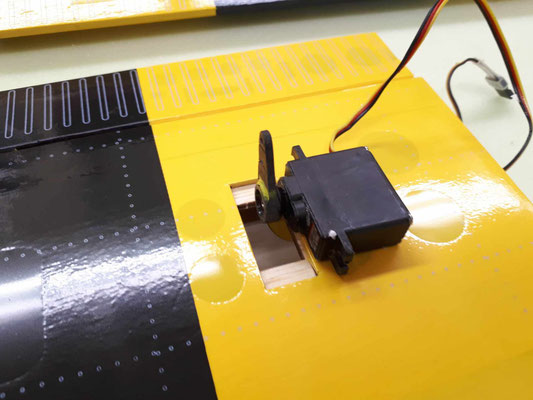
Die Servos wurde stehende verbaut, da eine flache Verbauung an den vorgesehenen Stellen unnötig großen Eingriff in den Flächenaufbau erfordert hätte.
Dafür wurden die Servos dann rundherum mit Plasti-Dipp abgedichtet. Vorher jedoch mittels Krepp Band abgedeckt und nach dem
Abtrocknen mit einem Skalpell sauber abgeschnitten.
Man kann dies jedoch auch mit durchsichtigen Silikon machen, jedoch lässt sich das Plasti-Dipp leichter entfernen…
Die Schwimmer sind bereits mit entsprechenden Aufnahmen für die Befestigung am Rumpf vorgesehen.
Für hinten ist diese Vorrichtung ja OK aber vorne wird sie gerade bei diesem Modell nicht benötigt.
Ich schulde dies jedoch der Tatsache, dass diese Art von Schimmern sicher bei mehr Versionen verwendet wird und daher auch diese Ausführung.
Diese Befestigungen wurden ebenfalls mit Porenfüller behandelt, danach abgeschliffen und gelb lackiert.
Zu einem späteren Zeitpunkt wird dann mal das vordere Teil entfernt werden…es stört nur die Optik…..


Die Elektrik......
Die Drehzahlsteller erhielten noch parallel zum Versorgungs-Eingang 6 Stk Elkos mit 330µF/35V. Man kann diese Enstör-Kondensatoren auch fertig kaufen aber da ich derartige Elektronik in meinen Fundus hatte, war das Erstellen kein Problem.
Folgende RC-Komponenten wurden verbaut:
-Spektrum Empfänger
-Torxster Gold A3548-Motoren
-Pichler Drehzahlsteller XQ70 Serie mit 6 Stk Elkos mit 330µF/35V parallel zum Versorgungs-Eingang
-Links/Rechts drehende Prop’s, 11x7“
-3S/3700mAH Lippo Akku
-Hitec HS-82MG Servos für Querruder und Landeklappen
-Hitec HS-325HB Servos für Seite und Höhe
Da weder ein Wasserruder verbaut ist noch wird das Seitenruder von den Motoren angeströmt wird, ist ein Lenken am Wasser nur schwer machbar.
Aus diesem Grunde werden die Motoren „ Differnziert“, dh. mittels Mischer so abgestimmt, dass beim Fahren am Wasser mit einem Schalter diese Funktion aktiviert und die Motoren in Abhängigkeit vom Seitenruder jeweils links oder rechts in der Drehzahl reduziert werden kann.
Dazu benötigt man jeden Drehzahlsteller auf einen separaten Kanal sowie drei freie Mischer.







Erstflug am 3.6.2018......
Bei perfekten Wetter und ruhigem Wasser konnte es gemeinsam mit anderen Wasserfliegern frühzeitig um 7 Uhr Morgend's
losgehen.
Das lag nicht am „Frühen Vogel fängt den Wurm“ sondern an der Tatsache, dass ab
8 Uhr bereits die ersten Badegäste kommen würden und denen wollten wir zuvorkommen…..
Die Umstände waren besser als erwartet und der Flieger wurde aufgerüstet…..


Ein wenig flau war mir schon aber der Flieger wurde in’s Wasser gesetzt und erste Schwimm und Steuerversuche unternommen.
Danach schön gegen den Wind ausgerichtet und stetig Gas gegeben.
Die Twin Otter beschleunigte zügig, kam auf Stufe und hob sauber und nur mit wenig Ziehen am Höhenruder ab… Besser geht es nicht




Sie verträgt schon ein wenig mehr Power an den Motoren aber das ist bei knappen 3,5 Kilo Startgewicht auch nicht verwunderlich!
Mit Halbgas lässt sie sich jedoch sauber einkurven und mit Seitenruder-Unterstützung gelingen schöne, ausgedehnte Kurven..schon fast Scale-like…..








Die ersten Landungen gelangen ganz gut, jedoch nicht perfekt.
Sie will flach angeflogen werden, am Besten mit gesetzten Klappen (10-15° ) aber nicht zu schnell…..
Die ersten Versuche waren noch ein wenig holprig,,,und „sprunghaft“…
Kurz vor der letzten Landung und ca. 1 Meter über der Wasseroberfläche… (die Klappen waren gesetzt…. ) tauchte sie plötzlich vorne rechts
ab, überschlug sich und blieb kopfüber im Wasser liegen…. Aus und vorbei...!
Anfänglich noch mit den Flächen am Wasser treibend, sogen sich die Flächen danach voll…

Der Flieger wurde mittels Kollegen und deren „Rettungsboot“ geborgen und erst mal viele Liter Wasser rausgelassen…
Zuhause dann Alles trockengelegt und dem Geruch nachgegangen….
Einen der Regler hat es zerrissen….aber wie!
Er war der ausschlaggebende Grund für den plötzlichen und abrupten " Abstieg"....




Die Innenseite der unteren rechten Abdeckung für die Motorgondel war ganz verklebt und Ver-dreckt mit einer Elektrolyt-Masse ( riecht so, wie es auch teuflisch klebt..…)…
Was meiner Meinung nach noch vor dem Absturz erfolgt sein muss, weil sonst verteilt sich unter Wasser die Masse nicht so derartig….und verbindet
sich so mit dem PVC!.
Während nun die Trocknungs-Phase lief ( ich musste zwischendurch geschäftlich verreisen..) hatte ich auch Kontakt zu Fa. Pichler als auch zu
größeren Modellbau-Fachhändler.
Alle Befragte ich nach kurzen Sachverhalt betreffend möglichem Grund und wo sie denn die Regler positionieren würden.
Von 5 Befragten gab es 3 Antworten mit „Rumpf“ und nur 2 mit „Fläche/Gondel“.
Von Fa. Pichler bekam ich ebenfalls den Hinweis, dass es keinen besonderen Einfluss hätte, wenn die Motorkabel länger sind.
Problematisch wäre die Zuleitung, also die Verbindung Akku zum Drehzahlsteller.
Auch der Techniker von Pichler erzählte mir, dass er mit über langen Motorkabel fliegt…und der muss es ja wissen…Zusatz-Elkos ebenfalls weglassen…bringt bei 3S nicht!
Resumee'......
Mein persönliches Resümee‘ für den Wiederaufbau::
-Drehzahlsteller:
In den Rumpf nahe dem Schwerpunkt verbauen. Die Motorkabel bis zum Verbindungs-Stecker so kurz als möglich halten und konfektionieren!
-Externes BEC:
Um vor nochmaligen elektrischen „Hoppala’s“ geschützt zu sein und trotzdem noch die Kontrolle
zu behalten, wird ein externes BEC verbaut. Die entsprechenden Anschlüsse am Regler werden aus dem Stecker entfernt und abisoliert!
-Expo / Dual-Rate:
Für HR und QR werden die Einstellungen noch mehr reduzieren ( Expo 60%), eventuell mittel
Stufenschalter umschaltbar…
-Ansteuerung HR und SR:
Die Ansteuerung des HR und SR mittels der beiliegenden ( und auch verbauten..) Stahlstangen wird gegen Bowdenzüge mit Stahlseelen getauscht, da sich diese leichtgängiger und exakter
bewe-gen.
Auf Grund von Feuchtigkeit in Kombination mit dem Stahl ist die Gefahr von Korrosion zu groß.
( ...die ausgebauten Stahlstangen waren bereits nach 3 Tagen angerostet und schwergängig...es droht Servo-Überlastung!!)
Präventiv-Maßnahmen...
Da sich die Flächen der TO nach dem Überschlag langsam mit Wasser füllten und beim Bergen vollständig unter Wasser waren, werden Gegenmaßnahmen
gesetzt:
Luftpolster-Folie wird überall im Rumpf, in der Bugnase und in den Gondeln platziert, um möglich viel Auftrieb zu bekomme…schaden kann’s nicht….
Ebenfalls wird Schaum-Material überall dort verbaut, wo man leicht dazukommt.( zB. Deckel, Dach-bereich hinter dem Deckel.
Die eine Öffnung in der Fläche ( im Bereich der Motorgondel..), aus der die Motorkabel kommen, wird so weit als möglich verschlossen und mit Plasti-Dipp abgedichtet.
-Ansteuerung HR und SR.
Die Wahl viel deshalb auf Luftpolsterfolie, da es zwar größere Verpackungs-Ballons gibt, die aber bei Beschädigung gleich die ganze Luft verlieren.
Bei der Luftpolster-Folie müssen hingegen schon einige Hundert gleichzeitig versagten.
Ich erwäge sogar beim nächsten Flug einen Luftballon soweit aufzublasen und in den
zugänglichen Bereich des Rumpfes zu „stopfen“….
So zumindest der gedanken-Ansatz.....




Die Ansteuerung des HR und SR mittels der beiliegenden ( und auch verbauten..) Stahlstangen wird gegen Bowdenzüge mit Stahlseelen
getauscht, da sich diese leichtgängiger und exakter bewe-gen.
Auf Grund von Feuchtigkeit in Kombination mit dem Stahl ist die Gefahr von Korrosion zu groß.
( ...die ausgebauten Stahlstangen waren bereits nach 3 Tagen angerostet und schwergängig...es droht Servo-Überlastung!!)
Lande-Scheinwerfer...
Zur besseren Lageerkennung im Landeanflug werden Landescheinwerfer
verbauen.
Da der Flieger schon fertig aufgebaut ist und noch die ( alten ) Servokabel zum Ansteuern der Regler in den Gondel liegen, wird dieses Kabel nun benutzt, um einen einfachen elektronischen Schalter
anzusteuern.
Damit wird der Landescheinwerfer ein und aus geschalter …per Fahrwerks-Schalter auf meiner DX9…







Mit ein wenig Eigeninitiative ( Abdichten mit Heißkleber und anlöten eines alten Servokabels fürdie Versorgung) ist es auch schon getan.
Sie befinden sich unterhalb der Motoren und werden nur in alten Vitamin-C-Tablettendosen ge-steckt.
Diese habe ich abgelängt, in der Mitte ein Montage-Loch und seitlich ein größeres Loch für des Servo-Stecker gebohrt und an der Rückwand mittels einer kleinen Schraube befestigt.
Die Befestigung in der Dose erfolgt mit einfachem Klettband.
Die Lampe ist somit jederzeit zu entfernen.
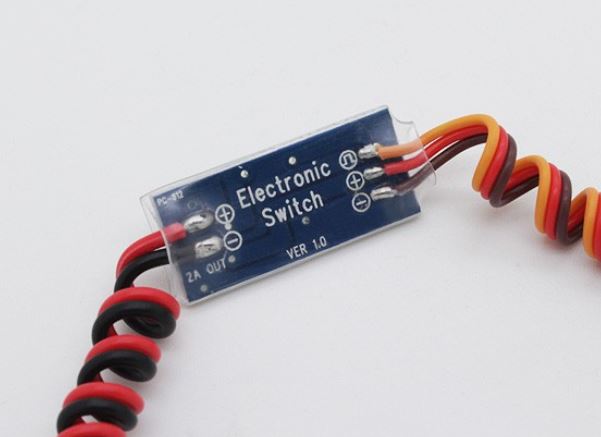
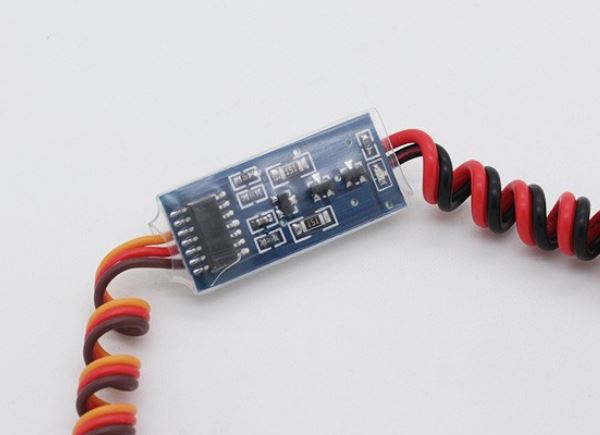
Die Ansteuerung erfolgt über dem Empfänger, ebenfalls die Stromversorgung wobei jede Lampe eine eigene Steuereinheit besitzt und über ein Y-kabel in jede Gondel anagesteuert wird. Diese stammt vom großen HK…mit dem Namen „Dr. Mad Thrust Electronic On/Off Switch“.
Er hat eine Abmessung von ca. 30x15mm, nur etwa 5g schwer und schafft 2 A bei 4,8-7,4 V.
Servo-Stecker auf der einen, JR-Stecker auf der anderen Seite.
Die Leuchtkraft wird sich beim nächsten Flug als ausreichend oder nicht bestätigen.....
Er hat eine Abmessung von ca. 30x15mm, nur etwa 5g schwer und schafft 2 A bei 4,8-7,4 V. Servo-Stecker auf der einen, JR-Stecker auf
der anderen Seite.
Link hier !
Die Leuchtkraft wird sich beim nächsten Flug als ausreichend oder nicht bestätigen.....
Ansteuerung der Motoren....
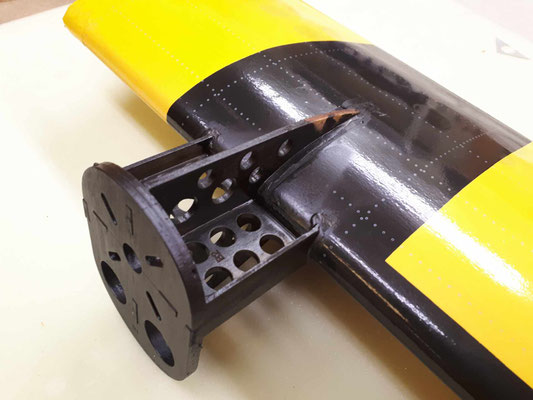
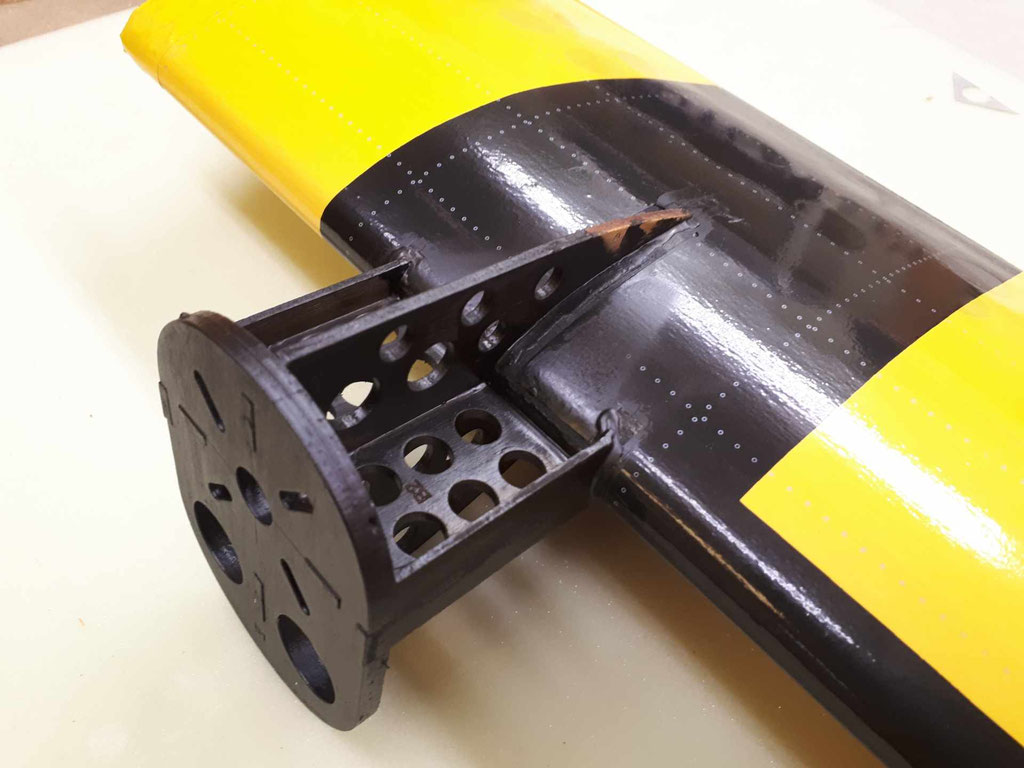
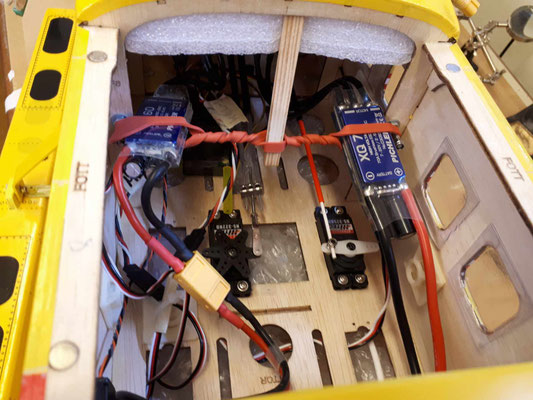
Da ja der Drehzahlsteller nicht mehr in der Gondel sondern im Rumpf verbaut wurde, sind nun die Motorkabel zu verlängern gewesen.
Bei der Wurzelrippe wurden daher 3-polige Stecker verwendet, die auch eine
Verpolung-Sicherung enthalten. Sie können nur in einer Position verbunden werden….
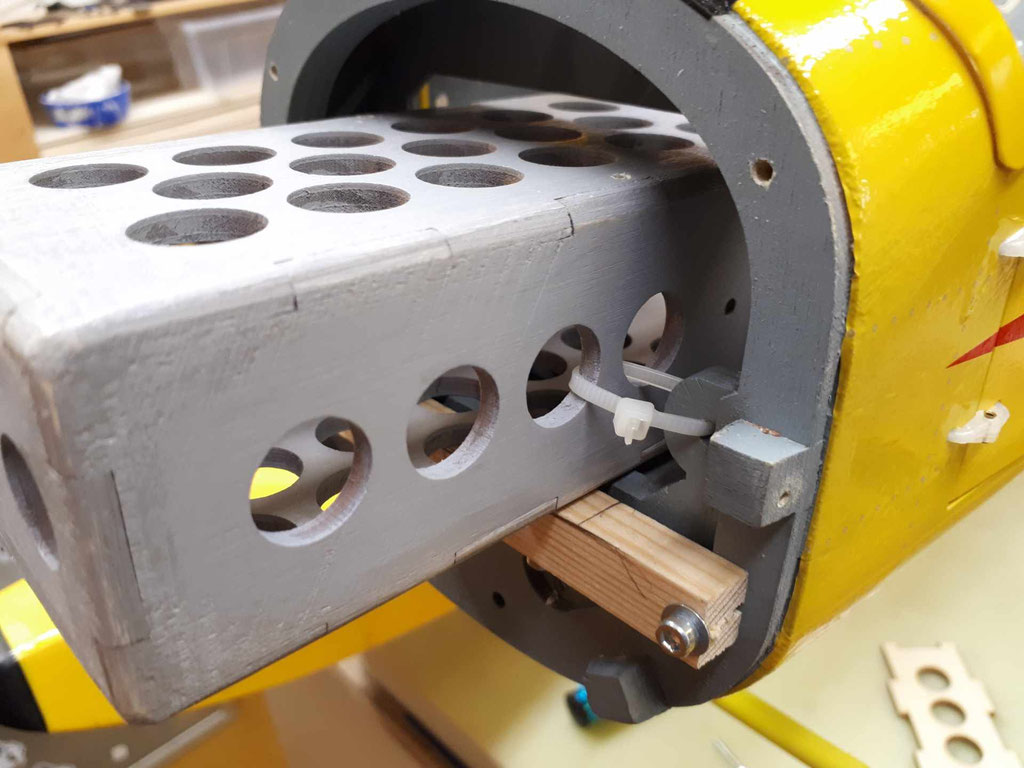
Die Drehzahlsteller wurden nun mittels einfachen „Einsiedegummi“ befestigt. Dazwischen eingespannt und mit einem kleinen Buchenholz-Stück verdrillt, hängen die beiden Steller nun förmlich in der Luft…

Die Drehzahlsteller wurden nun mittels einfachen „Einsiedegummi“ befestigt. Dazwischen eingespannt und mit einem kleinen Buchenholz-Stück verdrillt, hängen die beiden Steller nun förmlich in der Luft…
Technische Daten...
Spannweite: 1.840 mm
Länge : 1.375 mm
Fluggewicht: 3.400 g
Motor : TORCSTER A3542/6-1060
Regler: PICHLER XQ 70
Servos : QR, LK HITEC HS-82MG
SR, HR HITEC HS-235NB
Propeller: APS 11“ x 7,5“ ( beide rechtslaufend )
Akku: SLS Quantum 5000mAh , 3S/40
Lichtschalter: Dr. Mad Thrust Electronic On/Off Switch von HK ( in jeder Fläche)
LED: Turnigy Super Bright 2 x White Add On LED Light Set von HK ( in jeder Nasenleiste)












Twin Otter -Motordifferenzierung ...
Bei Modellen, die zumindest ein Wasserruder an einen der Schwimmer hat, ist das Manövrieren am Wasser Keno Problem. Ebenfalls, wenn die Modelle große Seitenruder besitzen.
Bei der Twin Otter ist zwar ein großes Seitenruder vorhanden, jedoch wird dies durch die zwei außen liegenden Motoren nicht angeströmt. Ein manövrieren wäre demnach am Wasser nur bei höherer Geschwindigkeit möglich und das ist nicht so optimal.
Abhilfe schafft hier ein sogenanntes Differenzieren der Antriebsmotoren. Beim Aktivieren ( durch einen festgelegten Schalter ), sind die Drehzahlen der beiden Motoren abhängig von der Seitenruder-Steuerung bzw. Position. Wird nach links geklengt ( Seitenruder links) so dreht der rechte Motor höher als der Linke und umgekehrt.
Um dies zu nutzen, muss schon vorab bei der Programmierung dies berücksichtigt sein. Dafür werden drei Mischer benötigt.
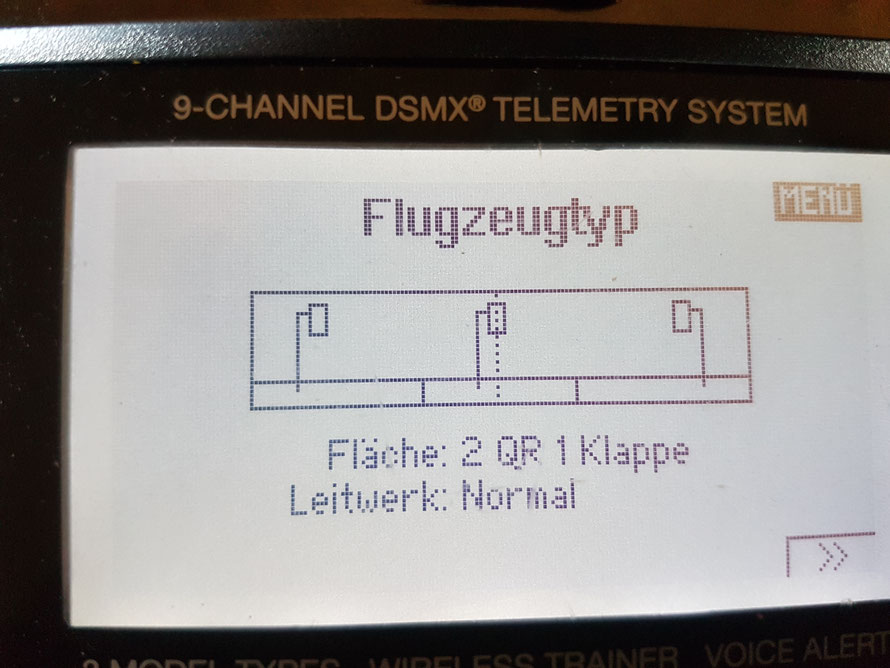
Bei meiner Spektrum DX9 habe ich vorab schon folgende Einstellungen vorgenommen.:
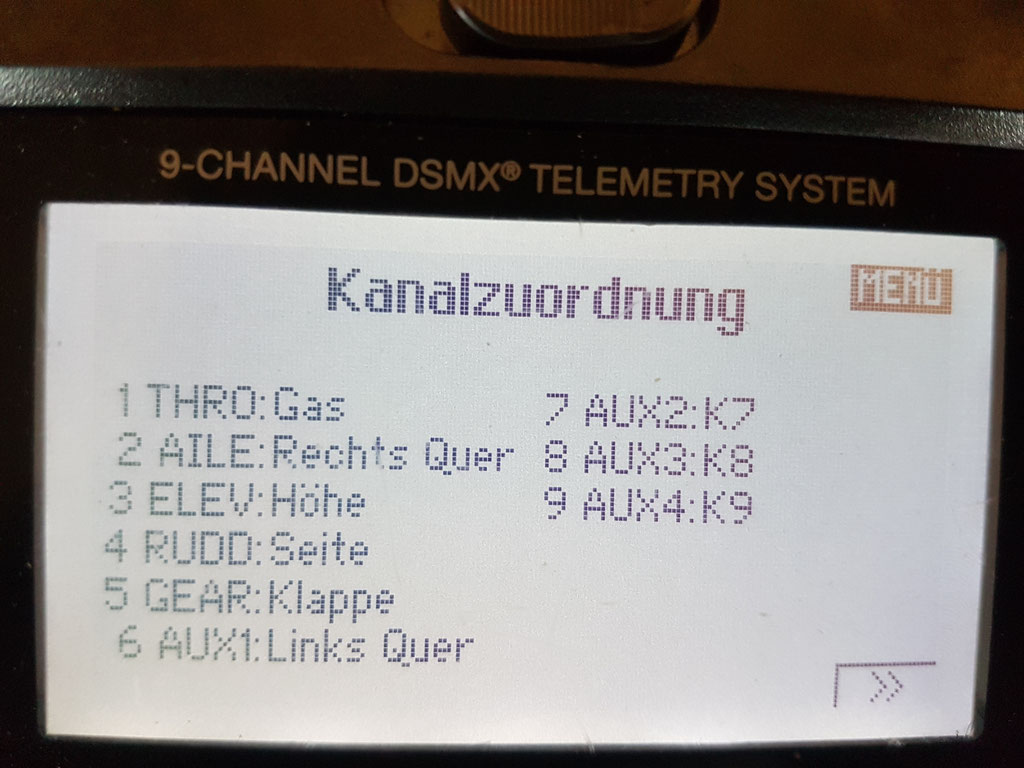
Auswahl der Anzahl Querruder und Landeklappen:
Kanalzuordnung ( als Zusätzlicher Gas-Kanal ist hier K8 vorgesehen, sowie die Geber-Einstellung ( RTrA ist die Trimmung für einen Motorregler):

Hier nun die Mischer-Einstellungen:
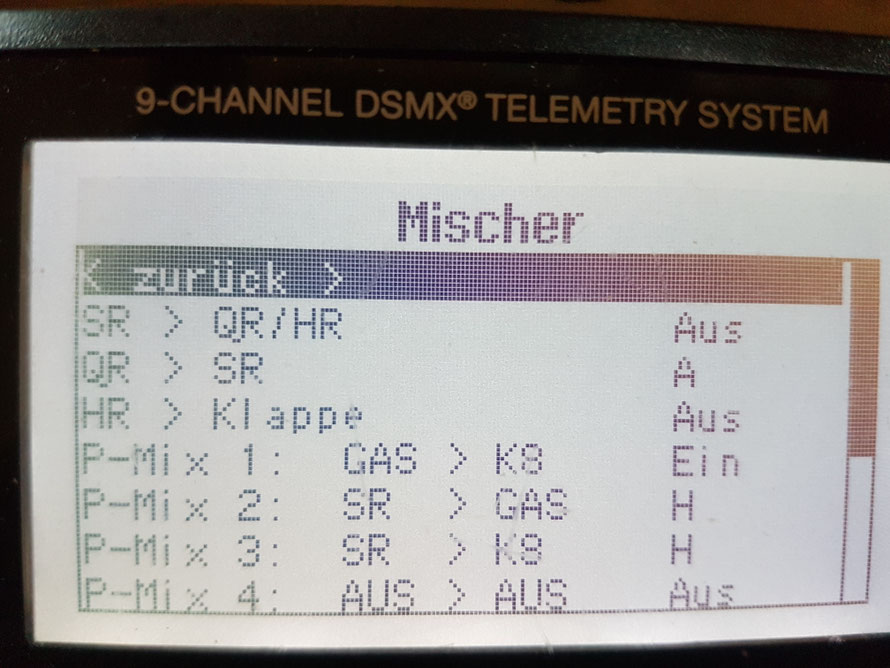
Hier sollte angemerkt werden, dass der1. Mischer Gas > K8 unbedingt auf EIN gestellt werden muss, da sonst die Regelung des 2 Motors ( K8) nicht "synchron" erfolgt.

Hier werden die beiden Kanäle Gas und K8 “parallel” geschalten, also für beiden Kanöle aktiviert.
Die
Einstellungen bei “RATE” sind je nach Ansprechverhalten des SR für Links und Rechts vorzunehmen, dehr die unterschiedlichen Werte.
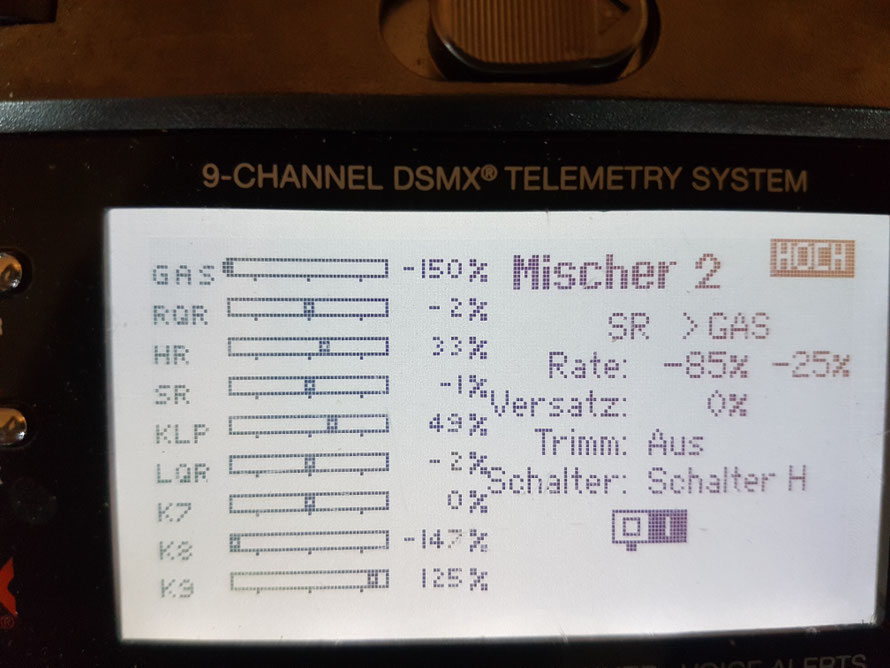
Hier wird das SR auf den einen Gaskanal ( GAS) gelegt, als Aktivierung dient der Schalter H auf der DX9. Auch hier wieder die unterschiedlichen Werte für den “RATE” Wert.
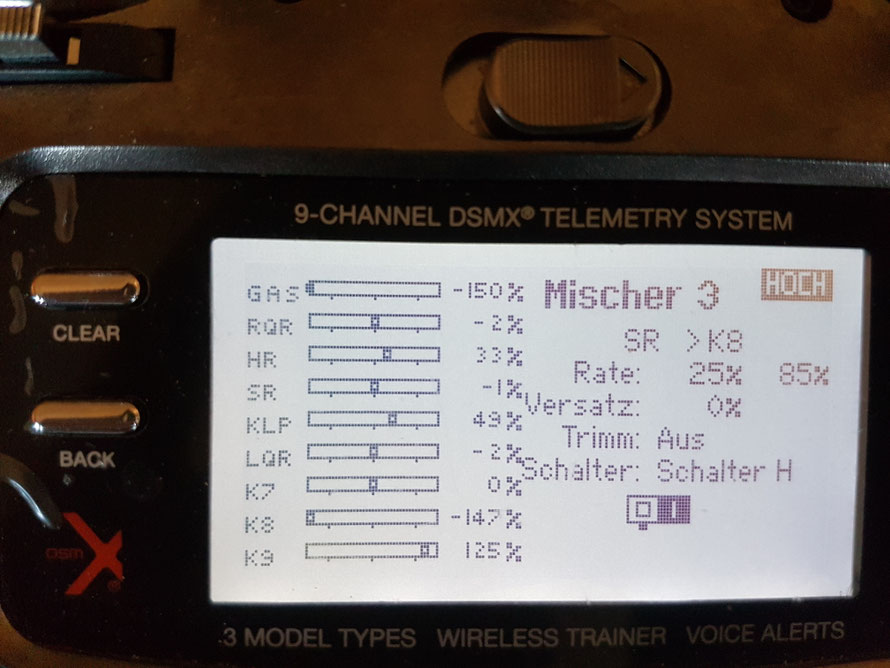
Hier wird das SR auf den anderen Gaskanal ( K8) gelegt, als Aktivierung dient der Schalter H auf der DX9.
Die tatsächlichen Werte entstehen dann vorort am Wasser und sind von Modell zu Modell unterschiedlich.
ACHTUNG:
Diese Differenzierung durch Aktivieren des Schalter H ist nur für das Steuern am Wasser vorgesehen.
Beim START, nach Ausrichten gegen den Wind, ist dieser Schalter zu deaktivieren und die Beiden Motoren arbeiten „parallel“.
Ich habe es selber nicht ausprobiert aber gerade beim Start sollte die volle Kraft auf die Motoren geleitet werden und nicht durch Richtungswechsel durch das SR beeinträchtigt werden.
Dies könnte zu möglichen Strömungsabriss und Crash führen.